Uso de Controlador de Velocidad Electrónico
(ESC)
Mediante este post se da a conocer el ESC (Electronic Speed Controller) se trata de un controlador de velocidad para motores BLDC, dichos motores poseen unas características especiales, como:
- Puede Alcanzar altas velocidades (Según su factor Kv)
- Posee 3 fases
- Para poder accionar un motor BLDC se requiere de un control, ya sea trapezoidal o SVPWM.

Figura 1. Control de motor BLDC
Debido a que su control no es muy sencillo de implementar, tal cual como se observa en la Figura 1; y requiere q sea bastante eficiente, ya que requiere de algún tipo de retroalimentación de la velocidad del motor ya sea mediante la EMF generado por las bobinas o haciendo uso de encoders. Además, el costo de un ESC es bastante accesible para todo lo que puede realizar.
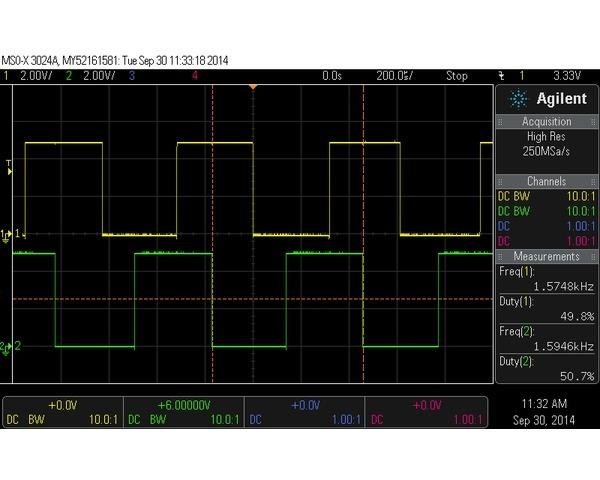
Se puede decir que la gran mayoría de ESC poseen el protocolo que se utiliza en un motor servo, el cual es una señal PWM de 50 Hz, que lo único que varía es el duty, el cual puede oscilar entre 1ms y 2ms.
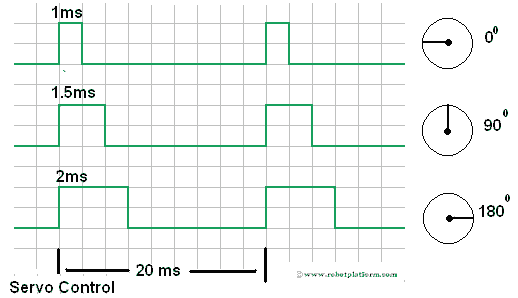
Figura 2. Control Servo (50 Hz)
En este tutorial se desea hacer enfasis en el uso de la turbina EDF27 de HobbyKing, el cual posee un motor BLDC y el cual posee un factor Kv de 11000Kv, lo que quiere decir que alcanza 11000 RPM por voltio aplicado, esto quiere decir que si alimentamos esta turbina con una bateria de 2 celdas tendriamos una velocidad maxima de 8.4V*110000Kv = 92400RPM, además se recomienda usar un ESC que soporte de 6 – 10A o más.
Las conexiones a realizar son sencillas, com ose observa en Figura 3. Recordar que las bobinas del motor no poseen polaridad, solo que si deseamos cambiar el sentido de giro, podemos intercalar o cambiar dos fases y asi girará en sentido contrario.
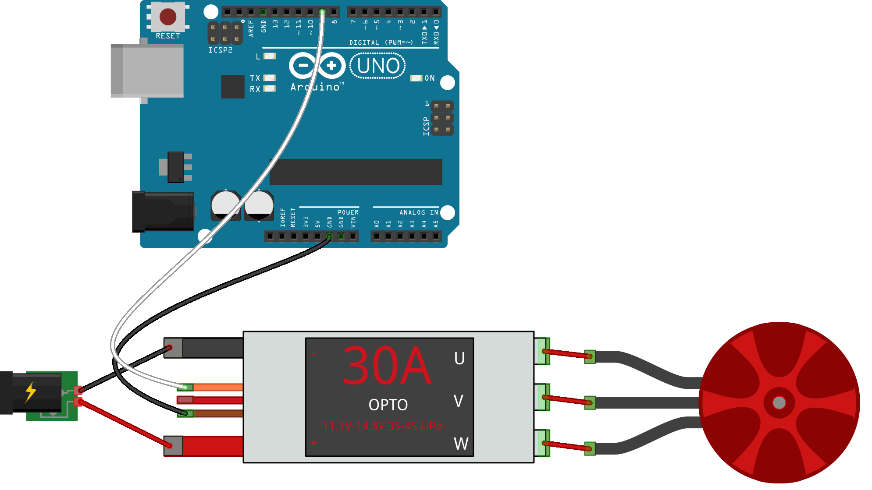
Figura 3. Conexión ESC
A continuación, se da un código de ejemplo, con la turbina EDF27, el cual desarrolle la librería ESC Library para el uso de UN solo ESC, y así optimizar memoria y poderlo implementar de la mejor forma, dicho código es compatible con Arduino UNO, Nano, Leonardo y con la Baby Orangutan de Pololu. Les dejaré el enlace de la librería al final.

Figura 4. Turbina EDF27, implementada en seguidores de línea
Código Arduino:
/*
* Libreria desarrollada por Michael Vargas
* Ejemplo sencillo para el control de turbina 11000Kv EDF27
* ESC_Test.ino
*
* 07/01/2017
*/
#include <ESC.h>
#define PIN_ESC 10
ESC EDF27(PIN_ESC);
//Min - Max
//Change Speed in microseconds: 1000 - 2000
void setup() {
EDF27.init();//Inicializa el timer1
delay(150); //Pequeño tiempo de espera
}
void loop() {
EDF27.setSpeed(2000);//Enciende el motor al máximo
delay(2000);
EDF27.setSpeed(1500);//Apaga el motor
delay(2000);
}
Descargar Librería: ESC_Library-master.zip